
みんな、サイボーグって聞くとどんなものを想像する?
機械の体を持った人間とか、SF映画に出てくるようなピカピカのロボットを思い浮かべる人が多いんじゃないかな。
でも実は今、本物の「昆虫」に小さな機械を取り付けた「サイボーグ昆虫」の研究が、世界中の科学者の間でめちゃくちゃ熱いんだよ!
今回は、昆虫をまるでラジコンみたいに正確に操縦して、未来の災害現場のヒーローにしちゃうかもしれない、すっごくワクワクする最新研究のニュースを紹介するね!
なぜわざわざ「昆虫」をサイボーグにするの?
そもそも「なんで昆虫なの?普通にロボットを作ればいいじゃん!」って思うかもしれないよね。
最大の理由は、地震などで崩れてしまった建物での「レスキュー活動(捜索)」にあるんだ。
瓦礫の山には、人間や大きな救助犬が絶対に入れないような、細くて危険な隙間がたくさんある。そこに小さなロボットを送り込んで、逃げ遅れた人を見つけ出したい!というのが研究者たちの大きな目標なんだよね。
小さなロボットを作るのは超ハードモード
でも、昆虫サイズの超小型ロボットをイチから部品を組み立てて作るのは、とてつもなく難しいんだ。
カメラやセンサーを載せようとすると重くなるし、重くなれば大きなモーターとバッテリーが必要になる。でもサイズには限界があるから、すぐに電池切れになっちゃうし、デコボコな瓦礫の上を転ばずに歩く「足の動き」を再現するのも至難の業なんだよね。
だったら、何億年もかけて進化してきた「昆虫の完璧な体と足回り」をそのまま借りちゃえばいいんじゃない!?というのが、サイボーグ昆虫のすごいアイデアなんだ!
生きた昆虫の背中に小さなコンピューターや通信機を背負わせて、触角や神経に電気で指示を出せば、最強の超小型探査ロボットの出来上がりってわけだね。
サイボーグ昆虫の弱点「慣れ(馴化)」の壁
ところが、ここで大きな壁にぶつかったんだ。それが昆虫の「慣れ(馴化)」という現象だよ。
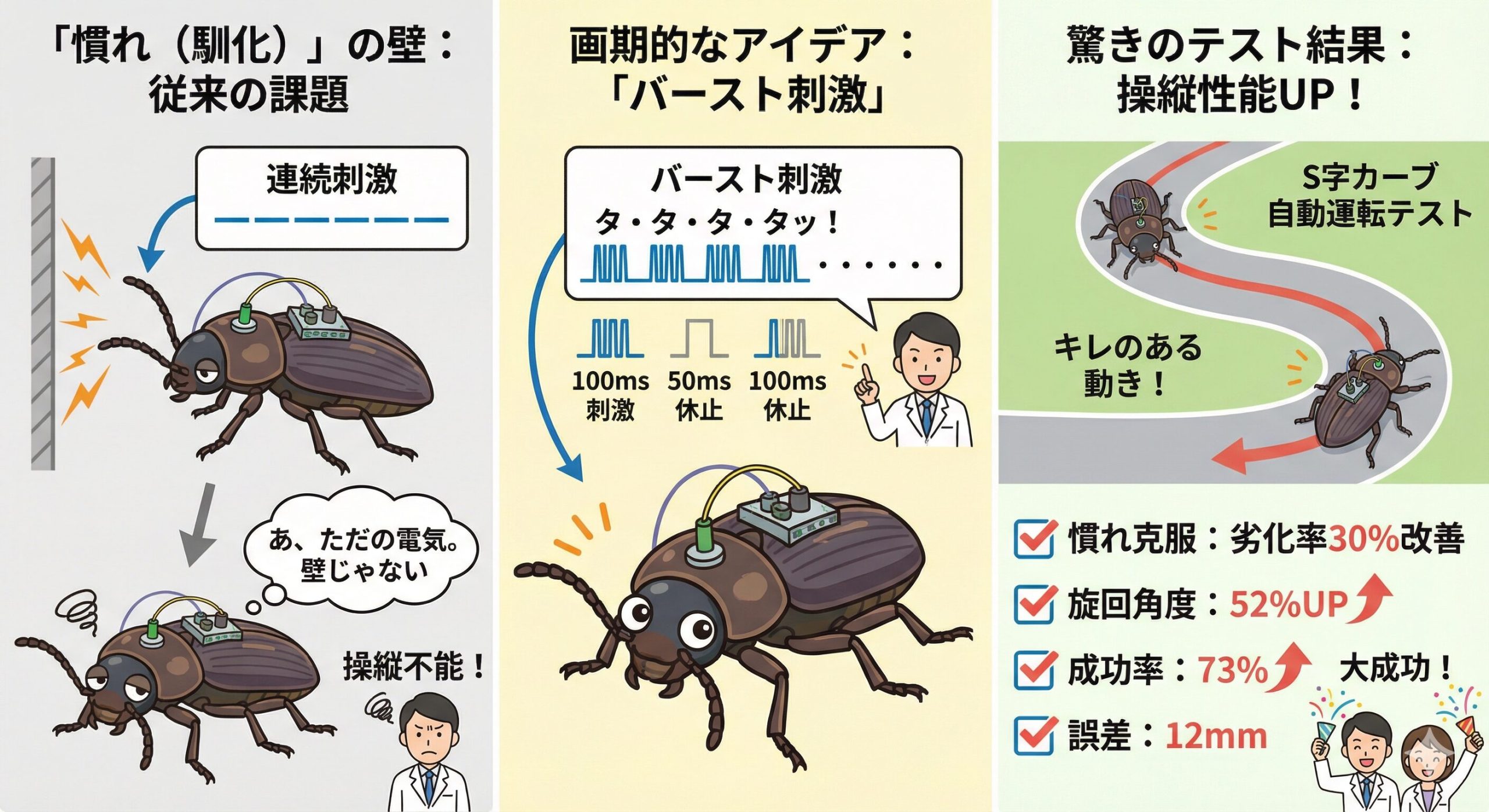
右に曲がらせたい時は左の触角に、左に曲がらせたい時は右の触角に電気刺激を送るんだけど、ずーっと同じ刺激を送っていると、昆虫が「あ、これただの電気じゃん。本当の壁じゃないや」って気づいてしまうんだ。
そうなると、いくら電気を流しても言うことを聞かなくなり、操縦不能になっちゃう。これが実用化に向けた最大の悩みだったんだよね。
画期的なアイデア!「バースト刺激」の実験
そこで、今回紹介する論文のチーム(Hai Nhan Le氏たち)が思いついたのが、昆虫へ送る電気の「リズム」を変えるという画期的なアプローチなんだ!
実験のパートナーに選ばれたのは「ゾフォバスモリオ」っていう、ちょっと大きめの甲虫(ペットの餌として有名なスーパーワームの成虫)だよ。
これまでは、曲がってほしい方向の触角に、ずーっと連続して電気を流し続ける「連続刺激」が当たり前だったんだ。
でも研究チームは、短い電気を「タタタタッ!」と細かく断続的に送る「バースト刺激」という方法を試したんだよ。
自動運転コースで実力テスト!
具体的には、100ミリ秒(0.1秒)という一瞬の電気刺激を4回送り、その間に50ミリ秒のお休みを挟むという、とってもリズミカルな方法を採用したんだ。
さらに、赤外線カメラで昆虫の動きを正確に追いかけながら、あらかじめ決められた「S字カーブ」のコースを自動で歩かせるという、高度な自動運転(自律ナビゲーション)のテストも行ったんだよ。
昆虫がコースからズレそうになったら、瞬時にコンピューターが計算して「右だよ!」「左だよ!」とバースト刺激で修正していく仕組みだね。
操縦性能が劇的アップ!驚きのテスト結果
この「バースト刺激」大作戦、結果はどうだったかというと……もう、見事な大成功だったんだ!
電気の送り方を細切れのリズムに変えただけで、昆虫の操縦性能が驚くほどアップしたんだよ。
「慣れ」を克服し、キレのある動きへ
まず一番の課題だった「慣れ」だけど、バースト刺激にすることで、反応が鈍くなる劣化率がなんと30%も改善されたんだ!いつまでもシャキッと指示に従ってくれるようになったってことだね。
しかも、1回の刺激で昆虫がグリンッと曲がる角度(旋回角度)が、従来の連続刺激に比べて52%も大きくなったの。
少ない電気でもクイックに大きく曲がってくれるから、操縦のキレが全然違うんだよ。まさにスポーツカー並みのハンドリング性能を手に入れたって感じだね!
車顔負けの正確なドライビング
そして、決められたS字カーブを歩かせる自動運転テストでも、素晴らしい結果が出たんだ。
指定したルートをゴールまで歩き切る成功率は73%を記録!さらに、理想のコースからのズレ(トラッキング誤差)は、たったの12ミリしかなかったんだよ。
昆虫自身の自由な意思を持った足で歩いているのに、これだけ正確にナビゲーションできるなんて、本当に信じられないくらいすごい技術だよね!
なぜ「細切れの電気」で言うことを聞くの?
じゃあ、なんで「細かく区切って電気を送る」だけで、昆虫は慣れることなく、しっかりと指示通りに動くようになったんだろう?
ここからが、めちゃくちゃ面白い科学の核心だよ!
実はこのバースト刺激、昆虫の「本当の感覚信号」を完璧にハッキングしているからなんだ!
自然界の「言葉」を真似る
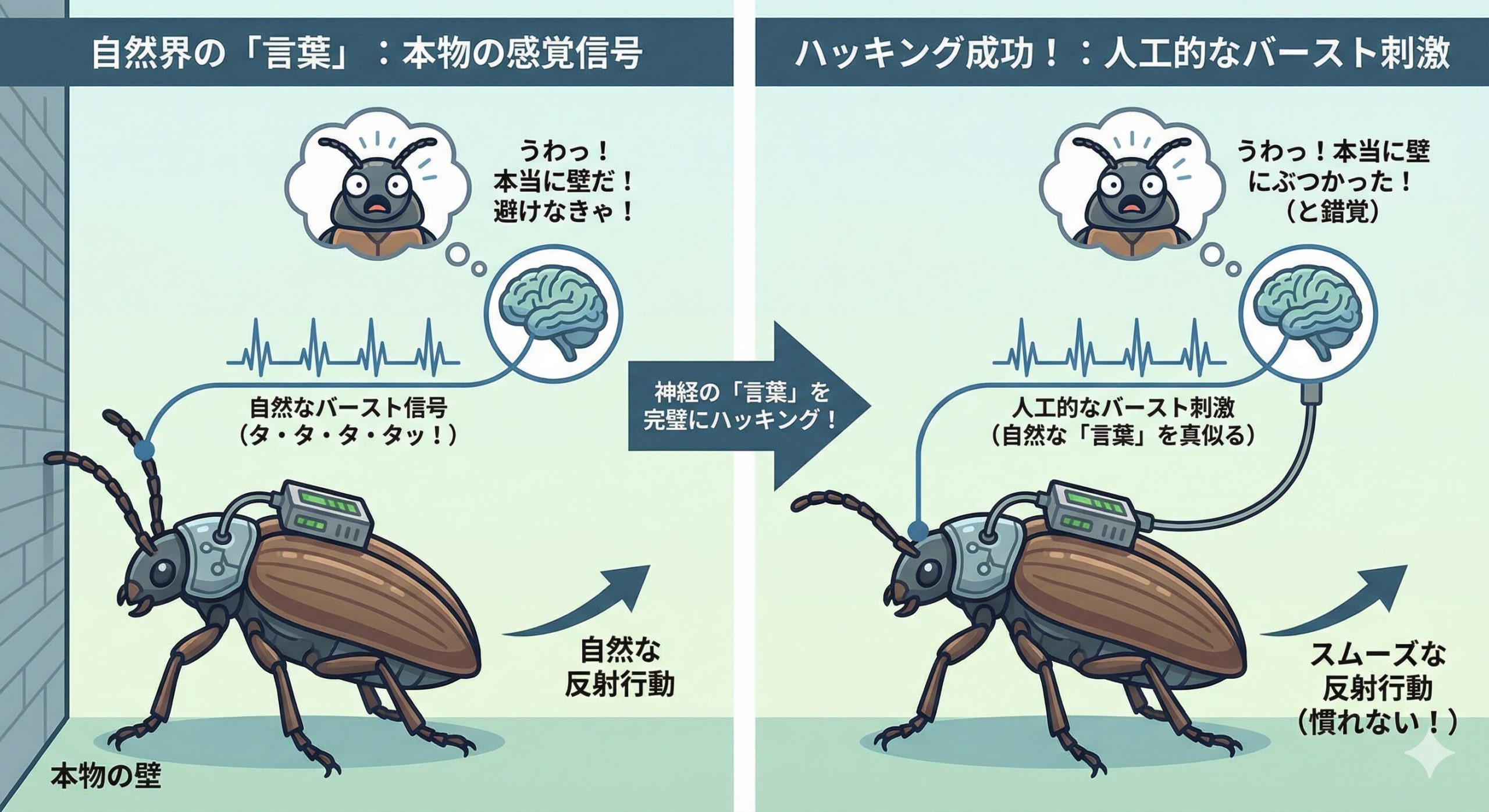
自然界で昆虫が歩いている時、触角が壁などの障害物にぶつかると「あ、壁だ!避けなきゃ!」って反射的に反対方向へ曲がるよね。
この時、触角のセンサーから脳へと伝わる神経の信号は、ずーっと一定の強さでのっぺりと流れているわけじゃないんだ。
生き物の神経系は、まさに「タタタタッ!」という短いバースト状のパルスとして信号を脳に送っているんだよ。
つまり、研究チームは人工的な電気刺激のリズムを、昆虫の神経が本来使っている「自然な言葉(発火パターン)」に寄せてあげたってわけ。
だから昆虫の脳は「うわっ!本当に壁にぶつかった!」と自然に錯覚して、慣れることなくスムーズに反射行動を起こしてくれたんだね。無理やり操るんじゃなくて、生き物のメカニズムをリスペクトして利用する。これってすごくスマートで美しい科学のアプローチじゃない!?
研究の限界と、サイボーグが活躍する未来
もちろん、これで全ての問題がパーフェクトに解決したわけじゃないんだ。
いくらバースト刺激が優秀でも、例えば「ずーっと右ばかり」に連続して曲がらせようとすると、やっぱり少しずつ反応は悪くなってしまうことが今回の実験でもわかっているんだよ。
だからこれからの課題は、片方の触角ばかりに刺激が偏らないように、ジグザグに歩かせたり、時には休ませたりする「より賢い自動運転プログラム(経路計画)」を作っていくことなんだって。
でも、この「バースト刺激」のおかげで、サイボーグ昆虫を長時間コントロールするという目標に、世界は大きく一歩前進したんだ!
近い将来、地震で倒壊した建物の中にこの小さなサイボーグ昆虫たちが入り込んで、背中のセンサーで要救助者の体温や呼吸を見つけ出してくれる……。そんな人命救助の最前線で彼らが活躍する未来が、もうすぐそこまで来ているのかもしれないね!
TKちゃんのまとめ!
今回のニュース、どうだった?僕が一番「ハッ」とさせられて面白いなって思ったのは、「相手の言葉に合わせてあげる」っていうアプローチなんだ。
人間の都合で力任せに一定の電気を流して無理やり動かすんじゃなくて、昆虫の神経が普段使っている「タタタタッ」っていう自然なリズム(言葉)で電気を送ってあげる。そうすることで、驚くほどスムーズに指示が通るようになった。
これって、僕たち人間の学校生活や友達とのコミュニケーションにも同じことが言えるんじゃないかな?自分の意見をただ一方的に力強く押し付けるんじゃなくて、相手が受け取りやすい言葉やタイミング、トーンを考えて伝えてみる。そうするだけで、お互いに反発することなく、スッと分かり合えることってあるよね。
最先端のサイボーグ昆虫の研究から、まさか僕たちの毎日の人付き合いのヒントをもらえるなんて思わなかったな!科学って、こういう予想外の気づきがあるから本当に最高だよね!それじゃあ、また次の面白い科学ニュースで会おうね!
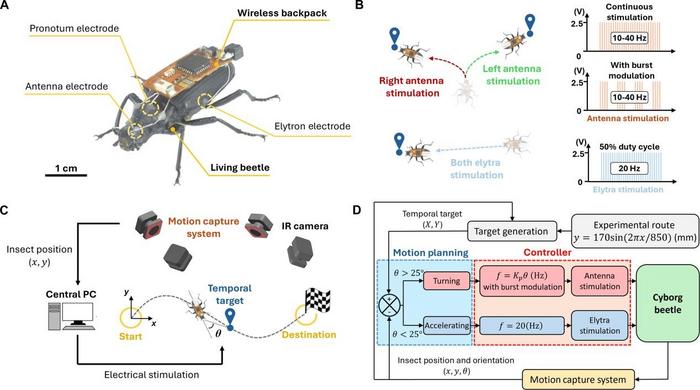
サイボーグカブトムシの自律航行フィードバック制御システム
ソース:EurekAlert! (Bust stimulation for sustained locomotion control and autonomous navigation of terrestrial cyborg beetles)









コメント